《2022年高中物理競賽 第5部分《振動和波》教案 新人教版》由會員分享����,可在線閱讀,更多相關(guān)《2022年高中物理競賽 第5部分《振動和波》教案 新人教版(13頁珍藏版)》請?jiān)谘b配圖網(wǎng)上搜索����。
1、2022年高中物理競賽 第5部分《振動和波》教案 新人教版
《振動和波》的競賽考綱和高考要求有很大的不同����,必須做一些相對詳細(xì)的補(bǔ)充。
一����、簡諧運(yùn)動
1����、簡諧運(yùn)動定義:= -k ①
凡是所受合力和位移滿足①式的質(zhì)點(diǎn)����,均可稱之為諧振子,如彈簧振子����、小角度單擺等。
諧振子的加速度:= -
2����、簡諧運(yùn)動的方程
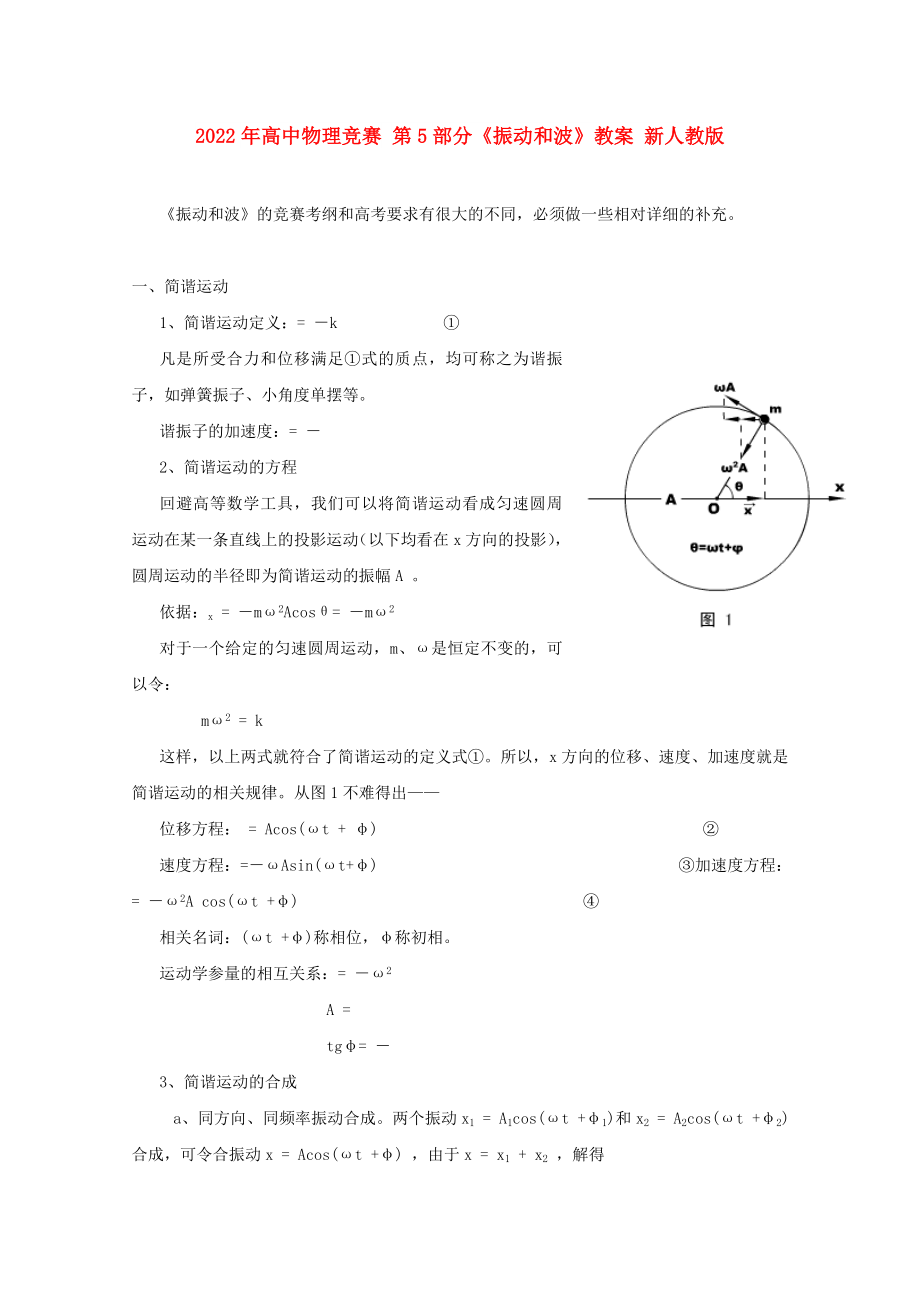
回避高等數(shù)學(xué)工具,我們可以將簡諧運(yùn)動看成勻速圓周運(yùn)動在某一條直線上的投影運(yùn)動(以下均看在x方向的投影)����,圓周運(yùn)動的半徑即為簡諧運(yùn)動的振幅A ����。
依據(jù):x = -mω2Acosθ= -mω2
對于一個給定的勻速圓周運(yùn)動,m����、ω是恒定不變的����,可以令:
2����、
mω2 = k
這樣,以上兩式就符合了簡諧運(yùn)動的定義式①����。所以,x方向的位移����、速度、加速度就是簡諧運(yùn)動的相關(guān)規(guī)律����。從圖1不難得出——
位移方程: = Acos(ωt + φ) ②
速度方程: = -ωAsin(ωt +φ) ③加速度方程:= -ω2A cos(ωt +φ) ④
相關(guān)名詞:(ωt +φ)稱相位,φ稱初相����。
運(yùn)動學(xué)參量的相互關(guān)系:= -ω2
A =
3、
tgφ= -
3����、簡諧運(yùn)動的合成
a����、同方向����、同頻率振動合成。兩個振動x1 = A1cos(ωt +φ1)和x2 = A2cos(ωt +φ2) 合成����,可令合振動x = Acos(ωt +φ) ,由于x = x1 + x2 ����,解得
A = ,φ= arctg
顯然����,當(dāng)φ2-φ1 = 2kπ時(k = 0,±1����,±2����,…)����,合振幅A最大����,當(dāng)φ2-φ1 = (2k + 1)π時(k = 0,±1����,±2,…)����,合振幅最小。
b����、方向垂直、同頻率振動合成����。當(dāng)質(zhì)點(diǎn)同時參與兩個垂直的振動x = A1cos(ωt + φ1)和y = A2cos(ωt + φ2)時,這兩個振動方程事實(shí)上已經(jīng)
4����、構(gòu)成了質(zhì)點(diǎn)在二維空間運(yùn)動的軌跡參數(shù)方程����,消去參數(shù)t后����,得一般形式的軌跡方程為
+-2cos(φ2-φ1) = sin2(φ2-φ1)
顯然,當(dāng)φ2-φ1 = 2kπ時(k = 0����,±1,±2����,…),有y = x ����,軌跡為直線,合運(yùn)動仍為簡諧運(yùn)動����;
當(dāng)φ2-φ1 = (2k + 1)π時(k = 0,±1����,±2,…)����,有+= 1 ,軌跡為橢圓����,合運(yùn)動不再是簡諧運(yùn)動;
當(dāng)φ2-φ1取其它值����,軌跡將更為復(fù)雜,稱“李薩如圖形”����,不是簡諧運(yùn)動。
c����、同方向、同振幅����、頻率相近的振動合成����。令x1 = Acos(ω1t + φ)和x2 = Acos(ω2t + φ) ����,由于合運(yùn)動x = x1 + x
5、2 ����,得:x =(2Acost)cos(t +φ)。合運(yùn)動是振動����,但不是簡諧運(yùn)動����,稱為角頻率為的“拍”現(xiàn)象����。
4����、簡諧運(yùn)動的周期
由②式得:ω= ,而圓周運(yùn)動的角速度和簡諧運(yùn)動的角頻率是一致的����,所以
T = 2π ⑤
5����、簡諧運(yùn)動的能量
一個做簡諧運(yùn)動的振子的能量由動能和勢能構(gòu)成����,即
= mv2 + kx2 = kA2
注意:振子的勢能是由(回復(fù)力系數(shù))k和(相對平衡位置位移)x決定的一個抽象的概念����,而不是具體地指重力勢能或彈性勢能。當(dāng)我們計(jì)量了振子的抽象勢能后����,其它的具體
6、勢能不能再做重復(fù)計(jì)量����。
6、阻尼振動����、受迫振動和共振
和高考要求基本相同。
二����、機(jī)械波
1����、波的產(chǎn)生和傳播
產(chǎn)生的過程和條件����;傳播的性質(zhì),相關(guān)參量(決定參量的物理因素)
2����、機(jī)械波的描述
a、波動圖象����。和振動圖象的聯(lián)系
b、波動方程
如果一列簡諧波沿x方向傳播����,振源的振動方程為y = Acos(ωt + φ),波的傳播速度為v ����,那么在離振源x處一個振動質(zhì)點(diǎn)的振動方程便是
y = Acos〔ωt + φ - ·2π〕= Acos〔ω(t - )+ φ〕
這個方程展示的是一個復(fù)變函數(shù)。對任意一個時刻t ����,都有一個y(x)的正弦函數(shù)����,在x-y坐標(biāo)下可以描繪出一個瞬時波形����。
7、所以����,稱y = Acos〔ω(t - )+ φ〕為波動方程����。
3、波的干涉
a����、波的疊加。幾列波在同一介質(zhì)種傳播時����,能獨(dú)立的維持它們的各自形態(tài)傳播,在相遇的區(qū)域則遵從矢量疊加(包括位移����、速度和加速度的疊加)����。
b����、波的干涉。兩列波頻率相同����、相位差恒定時,在同一介質(zhì)中的疊加將形成一種特殊形態(tài):振動加強(qiáng)的區(qū)域和振動削弱的區(qū)域穩(wěn)定分布且彼此隔開����。
我們可以用波程差的方法來討論干涉的定量規(guī)律。如圖2所示����,我們用S1和S2表示兩個波源,P表示空間任意一點(diǎn)����。
當(dāng)振源的振動方向相同時,令振源S1的振動方程為y1 = A1cosωt ,振源S1的振動方程為y2 = A2cosωt ����,則在空間P點(diǎn)(距
8、S1為r1 ����,距S2為r2),兩振源引起的分振動分別是
y1′= A1cos〔ω(t ? )〕
y2′= A2cos〔ω(t ? )〕
P點(diǎn)便出現(xiàn)兩個頻率相同����、初相不同的振動疊加問題(φ1 = ����,φ2 = )����,且初相差Δφ= (r2 – r1)。根據(jù)前面已經(jīng)做過的討論����,有
r2 ? r1 = kλ時(k = 0,±1����,±2����,…)����,P點(diǎn)振動加強(qiáng),振幅為A1 + A2 ����;
r2 ? r1 =(2k ? 1)時(k = 0,±1����,±2,…)����,P點(diǎn)振動削弱,振幅為│A1-A2│����。
4、波的反射����、折射和衍射
知識點(diǎn)和高考要求相同����。
5����、多普勒效應(yīng)
當(dāng)波源或者接受者相對與波的傳播介質(zhì)運(yùn)
9、動時����,接收者會發(fā)現(xiàn)波的頻率發(fā)生變化。多普勒效應(yīng)的定量討論可以分為以下三種情況(在討論中注意:波源的發(fā)波頻率f和波相對介質(zhì)的傳播速度v是恒定不變的)——
a����、只有接收者相對介質(zhì)運(yùn)動(如圖3所示)
設(shè)接收者以速度v1正對靜止的波源運(yùn)動。
如果接收者靜止在A點(diǎn)����,他單位時間接收的波的個數(shù)為f ����,
當(dāng)他迎著波源運(yùn)動時,設(shè)其在單位時間到達(dá)B點(diǎn)����,則= v1 ����,����、
在從A運(yùn)動到B的過程中,接收者事實(shí)上“提前”多接收到了n個波
n = = =
顯然����,在單位時間內(nèi),接收者接收到的總的波的數(shù)目為:f + n = f ����,這就是接收者發(fā)現(xiàn)的頻率f1 。即
f1 = f
顯然����,如果v1背離波源運(yùn)動,
10����、只要將上式中的v1代入負(fù)值即可。如果v1的方向不是正對S ����,只要將v1出正對的分量即可����。
b����、只有波源相對介質(zhì)運(yùn)動(如圖4所示)
設(shè)波源以速度v2正對靜止的接收者運(yùn)動。
如果波源S不動����,在單位時間內(nèi),接收者在A點(diǎn)應(yīng)接收f個波����,故S到A的距離:= fλ
在單位時間內(nèi),S運(yùn)動至S′����,即= v2 。由于波源的運(yùn)動����,事實(shí)造成了S到A的f個波被壓縮在了S′到A的空間里����,波長將變短����,新的波長
λ′= = = =
而每個波在介質(zhì)中的傳播速度仍為v ����,故“被壓縮”的波(A接收到的波)的頻率變?yōu)?
f2 = = f
當(dāng)v2背離接收者,或有一定夾角的討論����,類似a情形。
c����、當(dāng)接收者和波源均相
11、對傳播介質(zhì)運(yùn)動
當(dāng)接收者正對波源以速度v1(相對介質(zhì)速度)運(yùn)動����,波源也正對接收者以速度v2(相對介質(zhì)速度)運(yùn)動,我們的討論可以在b情形的過程上延續(xù)…
f3 = f2 = f
關(guān)于速度方向改變的問題����,討論類似a情形。
6����、聲波
a����、樂音和噪音
b����、聲音的三要素:音調(diào)、響度和音品
c����、聲音的共鳴
第二講 重要模型與專題
一、簡諧運(yùn)動的證明與周期計(jì)算
物理情形:如圖5所示����,將一粗細(xì)均勻、兩邊開口的U型管固定����,其中裝有一定量的水銀,汞柱總長為L ����。當(dāng)水銀受到一個初始的擾動后,開始在管中振動����。忽略管壁對汞的阻力,試證明汞柱做簡諧運(yùn)動����,并求其周期。
模型分析:對簡諧運(yùn)動的
12����、證明,只要以汞柱為對象����,看它的回復(fù)力與位移關(guān)系是否滿足定義式①,值得注意的是����,回復(fù)力系指振動方向上的合力(而非整體合力)。當(dāng)簡諧運(yùn)動被證明后����,回復(fù)力系數(shù)k就有了,求周期就是順理成章的事����。
本題中����,可設(shè)汞柱兩端偏離平衡位置的瞬時位移為x ����、水銀密度為ρ、U型管橫截面積為S ����,則次瞬時的回復(fù)力
ΣF = ρg2xS = x
由于L、m為固定值����,可令: = k ,而且ΣF與x的方向相反����,故汞柱做簡諧運(yùn)動。
周期T = 2π= 2π
答:汞柱的周期為2π ����。
學(xué)生活動:如圖6所示,兩個相同的柱形滾輪平行����、登高����、水平放置����,繞各自的軸線等角速����、反方向地轉(zhuǎn)動,在滾輪上覆蓋一塊均質(zhì)的木板����。已知兩滾
13、輪軸線的距離為L ����、滾輪與木板之間的動摩擦因素為μ、木板的質(zhì)量為m ����,且木板放置時,重心不在兩滾輪的正中央����。試證明木板做簡諧運(yùn)動����,并求木板運(yùn)動的周期����。
思路提示:找平衡位置(木板重心在兩滾輪中央處)→力矩平衡和ΣF6= 0結(jié)合求兩處彈力→求摩擦力合力…
答案:木板運(yùn)動周期為2π 。
鞏固應(yīng)用:如圖7所示����,三根長度均為L = 2.00m地質(zhì)量均勻直桿,構(gòu)成一正三角形框架ABC����,C點(diǎn)懸掛在一光滑水平軸上,整個框架可繞轉(zhuǎn)軸轉(zhuǎn)動����。桿AB是一導(dǎo)軌,一電動松鼠可在導(dǎo)軌上運(yùn)動?���,F(xiàn)觀察到松鼠正在導(dǎo)軌上運(yùn)動,而框架卻靜止不動����,試討論松鼠的運(yùn)動是一種什么樣的運(yùn)動����。
解說:由于框架靜止不動����,松鼠在豎直方向必
14、平衡����,即:松鼠所受框架支持力等于松鼠重力����。設(shè)松鼠的質(zhì)量為m ,即:
N = mg ①
再回到框架����,其靜止平衡必滿足框架所受合力矩為零。以C點(diǎn)為轉(zhuǎn)軸����,形成力矩的只有松鼠的壓力N、和松鼠可能加速的靜摩擦力f ����,它們合力矩為零����,即:
MN = Mf
現(xiàn)考查松鼠在框架上的某個一般位置(如圖7����,設(shè)它在導(dǎo)軌方向上距C點(diǎn)為x),上式即成:
N·x = f·Lsin60° ②
解①②兩式可得:f = x ����,且f的方向水平向左。
根據(jù)牛頓第三定律����,這個力就是松鼠在導(dǎo)軌方向上的合力。如果我們以C在導(dǎo)軌上的投影點(diǎn)為參
15����、考點(diǎn),x就是松鼠的瞬時位移����。再考慮到合力與位移的方向因素,松鼠的合力與位移滿足關(guān)系——
= -k
其中k = ����,對于這個系統(tǒng)而言����,k是固定不變的����。
顯然這就是簡諧運(yùn)動的定義式。
答案:松鼠做簡諧運(yùn)動����。
評說:這是第十三屆物理奧賽預(yù)賽試題,問法比較模糊����。如果理解為定性求解����,以上答案已經(jīng)足夠。但考慮到原題中還是有定量的條件����,所以做進(jìn)一步的定量運(yùn)算也是有必要的。譬如����,我們可以求出松鼠的運(yùn)動周期為:T = 2π = 2π = 2.64s ����。
二����、典型的簡諧運(yùn)動
1、彈簧振子
物理情形:如圖8所示����,用彈性系數(shù)為k的輕質(zhì)彈簧連著一個質(zhì)量為m的小球,置于傾角為θ的光滑斜面上����。證明:小球在彈
16、簧方向的振動為簡諧運(yùn)動����,并求其周期T 。
學(xué)生自己證明…����。周期T = 2π
模型分析:這個結(jié)論表明,彈簧振子完全可以突破放置的方向而伸展為一個廣義的概念����,且伸展后不會改變運(yùn)動的實(shí)質(zhì)����。其次����,我們還可以這樣拓展:把上面的下滑力換程任何一個恒力(如電場力),它的運(yùn)動性質(zhì)仍然不會改變����。
當(dāng)然,這里的運(yùn)動性質(zhì)不變并不是所有運(yùn)動參量均不改變����。譬如,振子的平衡位置����、振動方程還是會改變的����。下面我們看另一類型的拓展——
物理情形:如圖9所示,兩根相同的彈性系數(shù)分別為k1和k2的輕質(zhì)彈簧����,連接一個質(zhì)量為m的滑塊����,可以在光滑的水平面上滑動����。試求這個系統(tǒng)的振動周期T 。
解說:這里涉及的是彈簧的串����、并聯(lián)知識
17、綜合����。根據(jù)彈性系數(shù)的定義,不難推導(dǎo)出幾個彈性系數(shù)分別為k1����、k2、…����、kn的彈簧串、并聯(lián)后的彈性系數(shù)定式(設(shè)新彈簧系統(tǒng)的彈性系數(shù)為k)——串聯(lián): =
并聯(lián):k =
在圖9所示的情形中����,同學(xué)們不難得出:T = 2π
當(dāng)情形變成圖10時����,會不會和圖9一樣呢����?詳細(xì)分析形變量和受力的關(guān)系,我們會發(fā)現(xiàn)����,事實(shí)上,這時已經(jīng)變成了彈簧的并聯(lián)����。
答案:T = 2π 。
思考:如果兩個彈簧通過一個動滑輪(不計(jì)質(zhì)量)再與質(zhì)量為m的鉤碼相連����,如圖11所示,鉤碼在豎直方向上的振動周期又是多少����?
解:這是一個極容易出錯的變換——因?yàn)閳D形的外表形狀很象“并聯(lián)”����。但經(jīng)過仔細(xì)分析后����,會發(fā)現(xiàn)����,動滑輪在這個物理情形
18、中起到了重要的作用——致使這個變換的結(jié)果既不是串聯(lián)����、也不是并聯(lián)。
★而且����,我們前面已經(jīng)證明過,重力的存在并不會改變彈簧振子的振動方程����,所以為了方便起見,這里(包括后面一個“在思考”題)的受力分析沒有考慮重力����。
具體分析如下:
設(shè)右邊彈簧的形變量為x2 、滑輪(相對彈簧自由長度時)的位移為x 、鉤子上的拉力為F ����,則
k1x1 = k2x2
x =
F = 2 k2x2
解以上三式,得到:F = x ����,也就是說,彈簧系統(tǒng)新的彈性系數(shù)k = ����。
答:T = π 。
再思考:如果兩彈簧和鉤碼通過輕桿和轉(zhuǎn)軸����,連成了圖12所示的系統(tǒng),已知k1 ����、k2 、m ����、a 、b ����,再求鉤碼的
19����、振動周期T ����。
思路提示:探討鉤碼位移和回復(fù)力關(guān)系����,和“思考”題類似。
(過程備考:設(shè)右彈簧伸長x2 ����,則中間彈簧伸長x1 = x2
鉤碼的位移量x = x1 + x2
而鉤碼的回復(fù)力F = k1x1
結(jié)合以上三式解回復(fù)力系數(shù)k = = ,所以…)
答:T = 2π ����。
2、單擺
單擺分析的基本點(diǎn)����,在于探討其回復(fù)力隨位移的變化規(guī)律。相對原始模型的伸展����,一是關(guān)于擺長的變化����,二是關(guān)于“視重加速度”的變化����,以及在具體情形中的處理。至于復(fù)雜的擺動情形研究����,往往會超出這種基本的變形,而僅僅是在分析方法上做適當(dāng)借鑒����。
物理情形1:如圖13所示,在一輛靜止的小車內(nèi)用長為L的輕繩靜止
20����、懸掛著一個小鋼球����,當(dāng)小車突然獲得水平方向的大小為a的加速度后(a<g)����,試描述小球相對小車的運(yùn)動����。
模型分析:小鋼球相對車向a的反方向擺起����,擺至繩與豎直方向夾角θ= arctg時,達(dá)到最大速度����,此位置即是小球相對車“單擺”的平衡位置����。以車為參照����,小球受到的場力除了重力G外����,還有一慣性力F ����。所以����,此時小球在車中相當(dāng)于處在一個方向傾斜θ����、大小變?yōu)榈男隆爸亓Α钡淖饔?���,屬超重情況����。這是一種“視重加速度”增加的情形����。
解說:由于擺長L未變����,而g視 = ����,如果a很小����,致使最大擺角不超過5°的話����,小角度單擺可以視為簡諧運(yùn)動����,周期也可以求出來����。
答案:小球以繩偏離豎直方向θ= arctg的角度為平衡位
21����、置做最大擺角為θ的單擺運(yùn)動����,如果θ≤5°����,則小球的擺動周期為T = 2π
物理情形2:某秋千兩邊繩子不等長,且懸點(diǎn)不等高����,相關(guān)數(shù)據(jù)如圖14所示����,且有a2 + b2 = + ����,試求它的周期(認(rèn)為人的體積足夠?���。?���。
模型分析:用C球替代人,它實(shí)際上是在繞AB軸擺動����,類似將單擺放置在光滑斜面上的情形����。故視重加速度g視 = gcosθ= g ,等效擺長l = ����,如圖15所示。
由于a2 + b2 = + 可知����,AC⊥CB ����,因此不難求出
= ����,最后應(yīng)用單擺周期公式即可。
答案:T = 2π ����。
相關(guān)變換1:如圖16所示����,質(zhì)量為M的車廂中用長為L的細(xì)繩懸掛著一個質(zhì)量為m的小球����,車輪與水
22����、平地面間的摩擦不計(jì)����,試求這個系統(tǒng)做微小振動的周期����。
分析:我們知道����,證明小角度單擺作簡諧運(yùn)動用到了近似處理����。在本題����,也必須充分理解“小角度”的含義����,大膽地應(yīng)用近似處理方法����。
解法一:以車為參照����,小球?qū)⑾鄬σ粋€非慣性系作單擺運(yùn)動����,在一般方位角θ的受力如圖17所示����,其中慣性力F = ma ����,且a為車子的加速度����。由于球在垂直T方向振動����,故回復(fù)力
F回 = Gsinθ+ Fcosθ= mgsinθ+ macosθ ①
*由于球作“微小”擺動����,其圓周運(yùn)動效應(yīng)可以忽略����,故有
T + Fsinθ≈ mgcosθ ②
再隔離車
23����、,有 Tsinθ= Ma ③
解①②③式得 F回 =
*再由于球作“微小”擺動����,sin2θ→0 ����,所以 F回 = ④
令擺球的振動位移為x ����,常規(guī)處理 sinθ≈ ⑤
解④⑤即得 F回 = x
顯然����, = k是恒定的,所以小球作簡諧運(yùn)動����。最后求周期用公式即可����。
解法二:由于車和球的系統(tǒng)不受合外力,故系統(tǒng)質(zhì)心無加速度����。小球可以看成是繞此質(zhì)心作單擺運(yùn)動����,而新擺長L′會小于L ����。由于質(zhì)心是慣性參照系����,故小球的受力����、回復(fù)力的合成就很常規(guī)了����。
若繩子在車內(nèi)的懸掛點(diǎn)在正中央,則質(zhì)心在水平方向
24����、上應(yīng)與小球相距x = Lsinθ,不難理解����,“新擺長”L′= L ����。(從嚴(yán)謹(jǐn)?shù)囊饬x上來講����,這個“擺長”并不固定:隨著車往“平衡位置”靠近����,它會加長����。所以����,這里的等效擺長得出和解法一的忽略圓周運(yùn)動效應(yīng)事實(shí)上都是一種相對“模糊”的處理����。如果非要做精準(zhǔn)的運(yùn)算����,不啟用高等數(shù)學(xué)工具恐怕不行。)
答:T = 2π ����。
相關(guān)變換2:如圖18所示,有一個均質(zhì)的細(xì)圓環(huán)����,借助一些質(zhì)量不計(jì)的輻條����,將一個與環(huán)等質(zhì)量的小球固定于環(huán)心處����,然后用三根豎直的����、長度均為L且不可伸長的輕繩將這個物體懸掛在天花板上,環(huán)上三個結(jié)點(diǎn)之間的距離相等。試求這個物體在水平方向做微小扭動的周期����。
分析:此題的分析角度大變����。象分析其它物理
25����、問題一樣����,分析振動也有動力學(xué)途徑和能量兩種途徑����,此處若援用動力學(xué)途徑尋求回復(fù)力系數(shù)k有相當(dāng)?shù)碾y度����,因此啟用能量分析����。
本題的任務(wù)不在簡諧運(yùn)動的證明,而是可以直接應(yīng)用簡諧運(yùn)動的相關(guān)結(jié)論����。根據(jù)前面的介紹,任何簡諧運(yùn)動的總能都可以表達(dá)為
E = kA2 ①而我們對過程進(jìn)行具體分析時,令最大擺角為θ(為了便于尋求參量,這里把擺角夸大了)����、環(huán)和球的質(zhì)量均為m ,發(fā)現(xiàn)最大的勢能(即總能)可以表達(dá)為(參見圖19)
E = 2m·gL(1 ? cosθ) ②
且振幅A可以表達(dá)為
A = 2Lsin
26����、 ③
解①②③式易得:k =
最后求周期時應(yīng)注意,中間的球體未參與振動����,故不能納入振子質(zhì)量(振子質(zhì)量只有m)。
答:T = π ����。
三、振動的合成
物理情形:如圖20所示����,一個手電筒和一個屏幕的質(zhì)量均為m ,都被彈性系數(shù)為k的彈簧懸掛著����。平衡時手電筒的光斑恰好照在屏幕的正中央O點(diǎn)。現(xiàn)在令手電筒和屏幕都在豎直方向上振動(無水平晃動或扭動)����,振動方程分別為y1 = Acos(ωt + φ1),y2 = Acos(ωt + φ2) ����。試問:兩者初位相滿足什么條件時,可以形成這樣的效果:(1)光斑相對屏幕靜止不動:(2)光斑相對屏
27����、幕作振幅為2A的振動。
模型分析:振動的疊加包括振動的相加和相減����。這里考查光斑相對屏幕的運(yùn)動事實(shí)上是尋求手電筒相對屏幕的振動,服從振動的減法����。設(shè)相對振動為y ,有
y = y1 ? y2 = Acos(ωt + φ1) ? Acos(ωt + φ2)
= ?2Asinsin()
解說:(1)光斑相對屏幕靜止不動����,即y = 0 ,得 φ1 = φ2
(2)要振幅為2A ����,必須 = 1 ,得φ1 ? φ2 = ±π
答案:初位相相同����;初位相相反。
相關(guān)變換:一質(zhì)點(diǎn)同時參與兩個垂直的簡諧運(yùn)動����,其表達(dá)式分別為x = 2cos(2ωt +2φ) ����,y = sinωt ����。(1)
28、設(shè)φ = ����,求質(zhì)點(diǎn)的軌跡方程,并在xOy平面繪出其曲線����;(2)設(shè)φ = π ,軌跡曲線又怎樣����?
解:兩個振動方程事實(shí)已經(jīng)構(gòu)成了質(zhì)點(diǎn)軌跡的參數(shù)方程,我們所要做的����,只不過是消掉參數(shù),并尋求在兩個具體φ值下的特解。在實(shí)際操作時����,將這兩項(xiàng)工作的次序顛倒會方便一些����。
(1)當(dāng)φ = 時,x = ?2(1 ? 2sin2ωt) ����,即 x = 4y2 ? 2
描圖時應(yīng)注意,振動的物理意義體現(xiàn)在:函數(shù)的定義域 ?1 ≤ y ≤ 1 (這事實(shí)上已經(jīng)決定了值域 ?2 ≤ x ≤ 2 )
(2)當(dāng)φ =π時����,同理 x = 2(1 ? 2sin2ωt)= 2 ? 4y2
答:軌跡方程分別為x = 4y2
29、 ? 2和x = 2 ? 4y2 ����,曲線分別如圖21的(a)(b)所示——
四、簡諧波的基本計(jì)算
物理情形:一平面簡諧波向?x方向傳播����,振幅A = 6cm ,圓頻率ω= 6πrad/s ����,當(dāng)t = 2.0s時����,距原點(diǎn)O為12cm處的P點(diǎn)的振動狀態(tài)為yP = 3cm ����,且vP > 0 ,而距原點(diǎn)22cm處的Q點(diǎn)的振動狀態(tài)為yQ = 0 ,且vQ < 0 ����。設(shè)波長λ>10cm ,求振動方程����,并畫出t = 0時的波形圖����。
解說:這是一個對波動方程進(jìn)行了解的基本訓(xùn)練題����。簡諧波方程的一般形式已經(jīng)總結(jié)得出,在知道A����、ω的前提下,加上本題給出的兩個特解����,應(yīng)該足以解出v和φ值����。
由一般的波動方程y
30����、 = Acos〔ω(t - )+ φ〕
(★說明:如果我們狹義地理解為波源就在坐標(biāo)原點(diǎn)的話����,題目給出特解是不存在的——因?yàn)椴ㄏ?x方向傳播——所以����,此處的波源不在原點(diǎn)����。同學(xué)們自己理解:由于初相φ的任意性,上面的波動方程對波源不在原點(diǎn)的情形也是適用的����。)
參照簡諧運(yùn)動的位移方程和速度方程的關(guān)系����,可以得出上面波動方程所對應(yīng)質(zhì)點(diǎn)的速度(復(fù)變函數(shù))
v = ?ωAsin〔ω(t - )+ φ〕
代t = 2.0s時P的特解,有——
yP = 6cos〔6π(2 - )+ φ〕= 3 ����,vP = ?36πsin〔6π(2 - )+ φ〕> 0
即 6π(2 - )+ φ = 2k1π -
31����、 ①
代t = 2.0s時Q的特解,有——
yQ = 6cos〔6π(2 - )+ φ〕= 0 ����,vQ = ?36πsin〔6π(2 - )+ φ〕< 0
即 6π(2 - )+ φ = 2k2π + ②
又由于 = 22 ? 12 = 10 <λ ����,故k1 = k2 ����。解①②兩式易得
v = ?72cm/s , φ= (或?)
所以波動方程為:y = 6cos〔6π(t + )+ 〕����,且波長λ= v = 24cm ����。
當(dāng)t = 0時,
y = 6cos(x + ),可以
32����、描出y-x圖象為——
答案:波動方程為y = 6cos〔6π(t + )+ 〕,t = 0時的波形圖如圖22所示����。
相關(guān)變換:同一媒質(zhì)中有甲、乙兩列平面簡諧波����,波源作同頻率、同方向����、同振幅的振動����。兩波相向傳播����,波長為8m ,波傳播方向上A����、B兩點(diǎn)相距20m ����,甲波在A處為波峰時����,乙波在B處位相為? ,求AB連線上因干涉而靜止的各點(diǎn)的位置����。
解:因?yàn)椴恢兰?���、乙兩波源的位置,設(shè)它們分別在S1和S2兩點(diǎn)����,距A����、B分別為a和b ,如圖23所示����。
它們在A、B之間P點(diǎn)(坐標(biāo)為x)形成的振動分別為——
y甲 = Acosω(t - )= Acos〔ωt ? (a + x)〕
y乙 = Aco
33、sω(t ? )= Acos〔ωt ? (20 + b ? x)〕
這也就是兩波的波動方程(注意:由于兩式中a����、b����、x均是純數(shù),故乙波的速度矢量性也沒有表達(dá))
當(dāng)甲波在A處(x = 0)為波峰時����,有 ωt = ①此時,乙波在B處(x = 20)的位相為? ����,有 ωt ? = ? ②
結(jié)合①②兩式����,得到 b ? a = 2
所以,甲波在任意坐標(biāo)x處的位相 θ甲 = ωt ? (a + x)
乙波則為θ乙 = ωt ? (22 + a ? x)
兩列波因干涉而靜止點(diǎn)����,必然滿足θ甲 ?θ乙 =(2k -
34����、1)π所以有 x = 13 ? 4k ����,其中 k = 0����,±1,±2����,…
在0~20的范圍內(nèi)����,x = 1����、5、9����、13����、17m
答:距A點(diǎn)1m����、5m����、9m、13m����、17m的五個點(diǎn)因干涉始終處于靜止?fàn)顟B(tài)����。
思考:此題如果不設(shè)波源的位置也是可以解的����,請同學(xué)們自己嘗試一下…
(后記:此題直接應(yīng)用波的干涉的結(jié)論——位相差的規(guī)律����,如若不然,直接求y甲和y乙的疊加����,解方程將會困難得多����。此外如果波源不是“同方向”振動,位相差的規(guī)律會不同����。)
第三講 典型例題解析
教材范本:龔霞玲主編《奧林匹克物理思維訓(xùn)練教材》����,知識出版社,xx年8月第一版����。
例題選講針對“教材”第九����、第十章的部分例題和習(xí)題����。關(guān)于波的知識����,現(xiàn)在的很多奧賽教材都基本只涉及高考范疇的內(nèi)容����,《奧林匹克物理思維訓(xùn)練教材》的第十章也是如此。這是不是意味著奧賽的考綱有所更新——要求降低了����?
 2022年高中物理競賽 第5部分《振動和波》教案 新人教版
2022年高中物理競賽 第5部分《振動和波》教案 新人教版