《0910四自由度碼垛機(jī)器人控制系統(tǒng)設(shè)計(jì)》由會員分享����,可在線閱讀����,更多相關(guān)《0910四自由度碼垛機(jī)器人控制系統(tǒng)設(shè)計(jì)(8頁珍藏版)》請?jiān)谘b配圖網(wǎng)上搜索����。
1、
四自由度碼垛機(jī)器人控制系統(tǒng)設(shè)計(jì)
一����、四自由度碼垛機(jī)器人簡介
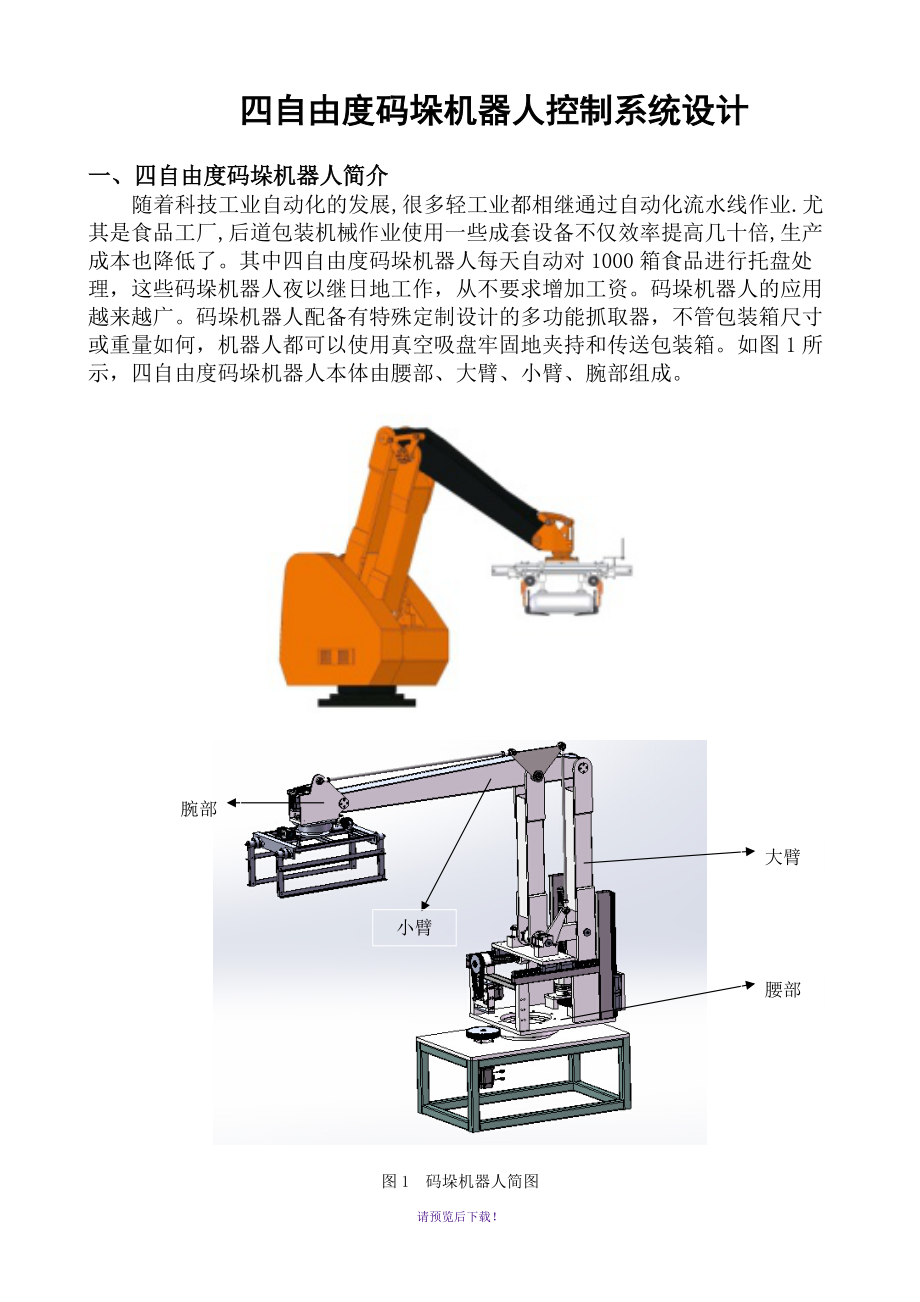
隨著科技工業(yè)自動(dòng)化的發(fā)展,很多輕工業(yè)都相繼通過自動(dòng)化流水線作業(yè).尤其是食品工廠,后道包裝機(jī)械作業(yè)使用一些成套設(shè)備不僅效率提高幾十倍,生產(chǎn)成本也降低了。其中四自由度碼垛機(jī)器人每天自動(dòng)對1000箱食品進(jìn)行托盤處理����,這些碼垛機(jī)器人夜以繼日地工作,從不要求增加工資����。碼垛機(jī)器人的應(yīng)用越來越廣。碼垛機(jī)器人配備有特殊定制設(shè)計(jì)的多功能抓取器����,不管包裝箱尺寸或重量如何,機(jī)器人都可以使用真空吸盤牢固地夾持和傳送包裝箱����。如圖1所示����,四自由度碼垛機(jī)器人本體由腰部����、大臂、小臂����、腕部組成。
腰部
大臂
小臂
腕部
圖1
2����、 碼垛機(jī)器人簡圖
請預(yù)覽后下載!
如圖2所示����,碼垛機(jī)器人具有獨(dú)特的線性執(zhí)行機(jī)構(gòu),使其保證了手部在水平與垂直方向的平行移動(dòng)����。
無
耦
合
垂
直
線
性
運(yùn)
動(dòng)
無耦合水平線性運(yùn)動(dòng)
圖2 碼垛機(jī)器人的線性執(zhí)行機(jī)構(gòu)運(yùn)動(dòng)示意圖
此四自由度碼垛機(jī)器人的應(yīng)用案例如圖3所示����。具有示教作業(yè)簡單,現(xiàn)場操作簡便����。
只需對抓取點(diǎn)與放
置點(diǎn)進(jìn)行示教,
最優(yōu)軌跡規(guī)劃
自動(dòng)由控制器生成����。
圖3 碼垛機(jī)器人的應(yīng)用案例
請預(yù)覽后下載!
二����、四自由度碼垛機(jī)器人控制要求及其控制方案
1、控制要求
如圖1所示����,四自由度碼垛機(jī)器人的運(yùn)
3、動(dòng)主要由控制腰部����、大臂、小臂����、腕部的驅(qū)動(dòng)電機(jī)實(shí)現(xiàn)。在此均采用松下A5伺服電機(jī)����;抓取部件等其他輔助運(yùn)動(dòng)采用氣動(dòng)����,由電磁閥動(dòng)作來控制抓取部件的動(dòng)作����。
四自由度碼垛機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)主要包括感知部分、硬件部分和軟件部分����,其運(yùn)動(dòng)控制系統(tǒng)的主要任務(wù)是要控制此機(jī)器人在工作空間中的運(yùn)動(dòng)位置、姿態(tài)和軌跡以及作業(yè)流程等����。此外,還要求:
1)防碰撞檢測和在線編程控制,可以進(jìn)行離線仿真����;
2)人機(jī)界面友善、高度可靠作性和安全性����;
3)便攜式觸摸屏示教器、全中文界面;
4)利用使能開關(guān)雙電路設(shè)計(jì)使在緊急狀態(tài)下自動(dòng)切斷伺服動(dòng)作����,從而保證安全����。
2、控制方案
控制方案1:基于PLC的運(yùn)動(dòng)控制方案
4����、
基于PLC的機(jī)器人運(yùn)動(dòng)控制系統(tǒng),一般利用觸摸屏進(jìn)行人機(jī)交互����。在觸摸屏上的人機(jī)界面����,由組態(tài)軟件編寫人機(jī)操作界面實(shí)現(xiàn)人機(jī)交互;PLC則通過I/O模塊與碼垛機(jī)器人以及現(xiàn)場設(shè)備通信并實(shí)現(xiàn)控制����,通過接受PLC的控制命令,實(shí)現(xiàn)機(jī)器人及其周邊����、物流設(shè)備的啟停與協(xié)調(diào)����,同時(shí)將碼垛機(jī)器人及其周邊����、物流設(shè)備的運(yùn)行狀態(tài)返回給PLC。
控制方案2:基于嵌入式PC的運(yùn)動(dòng)控制方案
請預(yù)覽后下載����!
基于嵌入式PC的運(yùn)動(dòng)控制模式,實(shí)現(xiàn)控制系統(tǒng)的模塊化����,同時(shí)又兼具開放性,可通過調(diào)用驅(qū)動(dòng)器的基本功能函數(shù)在嵌入式PC上編程來實(shí)現(xiàn)機(jī)器人的復(fù)雜控制算法。
圖中運(yùn)動(dòng)控制器實(shí)現(xiàn)對電機(jī)的基本控制,包括插補(bǔ),控制加減速等����。
5、嵌入式PC主要完成對運(yùn)動(dòng)控制器的控制,實(shí)現(xiàn)復(fù)雜的運(yùn)動(dòng)控制算法和人機(jī)界面����。
碼垛機(jī)器人軸數(shù):4軸(即4個(gè)伺服電機(jī),分別是3個(gè)750W����,型號MSMJ082G1U����,一個(gè)400w����,型號MSMJ042G1U)伺服系統(tǒng)選擇日本松下A5系列電機(jī)和配套驅(qū)動(dòng)器����。工控機(jī)選用工業(yè)以太網(wǎng)口嵌入式工控機(jī)。
控制軟件系統(tǒng)整體需求:
首先需要實(shí)現(xiàn)的機(jī)器人在運(yùn)動(dòng)空間內(nèi)實(shí)現(xiàn)單關(guān)節(jié),單電機(jī)驅(qū)動(dòng),也就是能夠?qū)崿F(xiàn)關(guān)節(jié)空間的單軸運(yùn)動(dòng)����;同時(shí)還需要實(shí)現(xiàn)在笛卡爾坐標(biāo)系中X軸、Y軸和Z軸的單軸運(yùn)動(dòng)����。這些基本的運(yùn)動(dòng)能作為示教編程的基礎(chǔ)。然后需要實(shí)現(xiàn)示教編程功能,要實(shí)現(xiàn)示教編程,需要保存機(jī)器人的當(dāng)前位置狀態(tài)信息,利用機(jī)器人的運(yùn)動(dòng)學(xué)方程及軌跡
6����、規(guī)劃算法來實(shí)現(xiàn)空間直線和空間圓弧的運(yùn)動(dòng)。最后要實(shí)現(xiàn)離線編程功能,則需要利用虛擬現(xiàn)實(shí)技術(shù)用計(jì)算機(jī)來模擬真實(shí)的機(jī)器人和工作環(huán)境����。通過對虛擬機(jī)器人的控制和編程來實(shí)現(xiàn)離線編程的功能����。
軟件應(yīng)包含的功能:——按面向?qū)ο蟮念愡M(jìn)行功能規(guī)劃與設(shè)計(jì)
功能1:設(shè)計(jì)軸類����,能夠?qū)崿F(xiàn)對碼垛機(jī)器人單軸的控制;通過軸類能夠設(shè)置和讀取運(yùn)動(dòng)控制卡中的針對各軸的參數(shù)
請預(yù)覽后下載����!
;通過軸類維護(hù)一個(gè)軸類的參數(shù)和位置的數(shù)據(jù)結(jié)構(gòu)����;通過軸類可以將其內(nèi)部的速度結(jié)構(gòu)讀出;通過軸類可以實(shí)現(xiàn)單軸運(yùn)動(dòng)����。
功能2:設(shè)計(jì)正逆運(yùn)動(dòng)學(xué)算法類,能夠隨時(shí)調(diào)用,通過正逆運(yùn)動(dòng)學(xué)算法類實(shí)現(xiàn)碼垛機(jī)器人的正逆運(yùn)動(dòng)學(xué)求解;通過正逆運(yùn)動(dòng)學(xué)算法類維護(hù)一
7����、個(gè)數(shù)據(jù)結(jié)構(gòu)記錄機(jī)器人結(jié)構(gòu)尺寸、運(yùn)動(dòng)范圍����;通過正逆運(yùn)動(dòng)學(xué)算法類維護(hù)一個(gè)數(shù)據(jù)結(jié)構(gòu)可以接受外界傳入的關(guān)節(jié)坐標(biāo)系位置值和笛卡爾坐標(biāo)系位置值����;通過正逆運(yùn)動(dòng)學(xué)算法類實(shí)現(xiàn)正運(yùn)動(dòng)學(xué)計(jì)算并返回運(yùn)算結(jié)果����;通過正逆運(yùn)動(dòng)學(xué)算法類實(shí)現(xiàn)逆運(yùn)動(dòng)學(xué)計(jì)算并返回運(yùn)算結(jié)果。
功能3:設(shè)計(jì)機(jī)器人類,在機(jī)器人類添加4個(gè)軸類分別代表不同的軸,同時(shí)還添加正逆運(yùn)動(dòng)學(xué)算法類����。通過機(jī)器人類實(shí)現(xiàn)將笛卡爾坐標(biāo)系中的位置值轉(zhuǎn)換為關(guān)節(jié)空間的位置值,并傳入軸類的PT運(yùn)動(dòng)緩存器(PT模式是固高運(yùn)動(dòng)卡中內(nèi)置的一種運(yùn)動(dòng)模式����,可以實(shí)現(xiàn)任意的速度曲線控制;另一含義:PT可編程終端)����。通過機(jī)器人類維護(hù)一個(gè)數(shù)據(jù)結(jié)構(gòu)來指示機(jī)器人當(dāng)前狀態(tài);通過機(jī)器人類啟動(dòng)機(jī)器人運(yùn)動(dòng)PT
8����、緩存中的軌跡。
功能4:實(shí)現(xiàn)控制器數(shù)據(jù)讀取,數(shù)據(jù)轉(zhuǎn)換,維護(hù)一個(gè)描述機(jī)器人運(yùn)動(dòng)數(shù)據(jù)的數(shù)據(jù)結(jié)構(gòu)����。
(1)機(jī)器人運(yùn)動(dòng)數(shù)據(jù)是指,各關(guān)節(jié)的運(yùn)行位移,速度,加速度,各軸的運(yùn)行位移,速度,加速度,執(zhí)行點(diǎn)的運(yùn)行位移,速度,加速度,電機(jī)編碼器的位移,速度,加速度����。實(shí)現(xiàn):讀取控制器的運(yùn)動(dòng)數(shù)據(jù),通過讀取的數(shù)據(jù)參數(shù)����、通過機(jī)器人的運(yùn)動(dòng)和結(jié)構(gòu)算法求出其他數(shù)據(jù)。作用:用于參數(shù)顯示,用于繪制圖形,用于控制虛擬模型����。
(2)通過以上說明,可以設(shè)計(jì)一個(gè)類,維護(hù)一個(gè)機(jī)器人的數(shù)據(jù)結(jié)構(gòu),可以調(diào)用數(shù)據(jù)進(jìn)行單獨(dú)顯示,可以整體調(diào)用。
功能5:可以設(shè)置機(jī)器人結(jié)構(gòu)參數(shù)����、運(yùn)動(dòng)參數(shù)、運(yùn)動(dòng)控制器參數(shù)和其他輔助參數(shù)����。同時(shí)可以顯示機(jī)器人運(yùn)動(dòng)狀態(tài)參
9、數(shù),系統(tǒng)參數(shù)和已經(jīng)設(shè)置的參數(shù)����。
說明:
(1)由于機(jī)器人和運(yùn)動(dòng)控制器都有多種不同的組合形式,需要設(shè)置不同的參數(shù),來達(dá)到某種配置形式。
(2)維護(hù)機(jī)器人結(jié)構(gòu)參數(shù),機(jī)器人運(yùn)動(dòng)參數(shù),運(yùn)動(dòng)控制器參數(shù),他輔助參數(shù)等多
個(gè)數(shù)據(jù)結(jié)構(gòu),可對這幾個(gè)數(shù)據(jù)結(jié)構(gòu),進(jìn)行單獨(dú)和組合配置,顯示����。
功能6:繪制單軸的位移圖,繪制單軸的速度圖,繪制單軸的加速度圖,繪制執(zhí)行點(diǎn)的位移圖,繪制執(zhí)行點(diǎn)的速度圖,繪制執(zhí)行點(diǎn)的加速度圖,繪制工作點(diǎn)的位移圖,繪制工作點(diǎn)的速度圖,繪制工作點(diǎn)的加速度圖����。
說明:
(1)通過菜單欄的工具選擇不同的圖實(shí)時(shí)顯示,顯示時(shí)創(chuàng)建新的窗口,可以同時(shí)顯示多個(gè)窗口����。
(2)對于每一個(gè)窗口,確定一組
10、顯示數(shù)據(jù)y軸,確定時(shí)間參數(shù)為X軸,確定顯示數(shù)據(jù)的大小
請預(yù)覽后下載����!
,確定y軸數(shù)據(jù)的范圍,生成X,y軸的坐標(biāo),刻度,背景,網(wǎng)格,動(dòng)態(tài)的顯示數(shù)據(jù)曲線,繪制曲線圖,可以同時(shí)在一張圖上顯示一組數(shù)據(jù)或者多組數(shù)據(jù)。
(3)通過上面兩條可以確定一個(gè)類MDrawWave,
這個(gè)類的屬性包括:
A.時(shí)間t要顯示的范圍timeScale;B.顯示數(shù)據(jù)的范圍yinScale;C.時(shí)間間隔tGap;D.顯示的數(shù)據(jù)數(shù)組指針;E.顯示數(shù)據(jù)數(shù)組的大小;F.計(jì)算數(shù)據(jù)數(shù)組大小,生成數(shù)據(jù)數(shù)組,生成刻度,繪制網(wǎng)格����。接口函數(shù)包括:A.寫入t的變動(dòng)范圍函數(shù);B.寫入yinScale的函數(shù);C.寫入時(shí)間間隔;D.寫入待
11����、顯示數(shù)據(jù)FIFO; E.調(diào)用顯示。在對話框類中通過菜單的Id來調(diào)用Windows消息響應(yīng)函數(shù),在消息響應(yīng)函數(shù)里來實(shí)現(xiàn)不同數(shù)據(jù)的圖形繪制����。
功能7:設(shè)計(jì)機(jī)器人軌跡規(guī)劃類,完成不同軌跡規(guī)劃的任務(wù)。
功能8:指令類,讀取輸入的指令,對指令進(jìn)行譯碼,并執(zhí)行指令代碼����。
功能9:指令文檔類,控制指令的輸入,和修改,檢查,報(bào)錯(cuò)����。
功能10:狀態(tài)欄顯示類,實(shí)現(xiàn)機(jī)器人狀態(tài)的檢測,程序的檢測����。
功能11:維護(hù)類,對出現(xiàn)的程序錯(cuò)誤進(jìn)行診斷。
功能12:虛擬機(jī)器人類,實(shí)現(xiàn)碼操機(jī)器人的實(shí)時(shí)監(jiān)控����。
機(jī)器人控制系統(tǒng)整體構(gòu)架采用自頂向下的設(shè)計(jì)方法。首先將要控制系統(tǒng)分為主要的四大模塊,包括機(jī)器人模塊,數(shù)據(jù)庫模塊,控制模塊,虛擬模塊和檢測模塊����。下面重點(diǎn)對機(jī)器人模塊進(jìn)行一些結(jié)構(gòu)描述。該模塊主要實(shí)現(xiàn)機(jī)器人的各軸運(yùn)動(dòng)控制,算法,手抓和數(shù)據(jù)維護(hù)����。其結(jié)構(gòu)如圖
請預(yù)覽后下載!
(注:可編輯下載����,若有不當(dāng)之處,請指正����,謝謝!)
請預(yù)覽后下載����!
 0910四自由度碼垛機(jī)器人控制系統(tǒng)設(shè)計(jì)
0910四自由度碼垛機(jī)器人控制系統(tǒng)設(shè)計(jì)